
Avanços da engenharia em cirurgia, mobilidade e atendimento ao paciente
E se um cirurgião cardíaco pudesse operar um coração batendo sem abrir o peito do paciente? Ou um robô flexível poderia navegar pela delicada ramificação dos vasos sanguíneos, ou brônquios nos pulmões, e depois enrijecer para realizar uma cirurgia na ponta? Ou um campo magnético poderia ser projetado para acionar um robô eliminador de placas dentro das artérias de uma pessoa?
Esses tipos de inovações já estão na vanguarda do campo da robótica médica, diz o professor de cirurgia Pierre Dupont, designer líder de sistemas robóticos para uso na área da saúde. “Pensei em estudar medicina em vez de engenharia”, admite ele, “então, quando tive a oportunidade de combinar as duas coisas, foi uma oportunidade fantástica”. O campo abrange instrumentos de precisão que podem ser implantados por médicos dentro do corpo humano para visualização, diagnóstico e tratamento, mas também invenções focadas no paciente, desde dispositivos portáteis que permitem aos diabéticos controlar o açúcar no sangue até robôs vestíveis que ajudam os pacientes com AVC a andar novamente.
Nem todas essas conquistas sairão do laboratório. Mas estão surgindo tendências graduais: no sentido de uma maior autonomia dos próprios robôs e de uma maior personalização para os utilizadores, sejam eles pacientes ou prestadores de cuidados de saúde.
O laboratório de pesquisa cirúrgica pediátrica da Dupont, composto principalmente por bolsistas de pós-doutorado e estudantes de pós-graduação, está localizado no Hospital Infantil de Boston. Foi aí que ele aprendeu sobre 1 em cada 3.000 crianças que nascem a cada ano com descolamento de esôfago. “A garganta termina em uma bolsa fechada”, diz ele, “e o estômago tem um pequeno coto que também está fechado”. Se a distância entre eles for superior a vários centímetros, costurar as duas pontas não funcionará – “as suturas se romperão”. As crianças com esta forma grave da doença – cerca de 15 a 20 por ano no seu hospital – “normalmente chegam aos 3 meses de idade para uma reparação”. O procedimento de reparo exige que eles fiquem paralisados e sedados em terapia intensiva durante semanas, enquanto o cirurgião aperta gradualmente as suturas, milímetro por milímetro, para estimular o crescimento do tecido. Eventualmente, as duas extremidades crescem o suficiente para serem reconectadas.
Mas “o que está acontecendo com o cérebro da criança?” Dupont se perguntou quando ouviu falar do procedimento pela primeira vez, “todo aquele tempo” na UTI? Embora alguns pesquisadores tenham se concentrado em tentar cultivar tecido vivo em laboratório que pudesse ser usado em reparos, Dupont percebeu: “Se você tiver algum tecido remanescente dentro do corpo que ainda tenha as propriedades corretas, basta usar um robô para aplicar forças de tração da maneira apropriada, você pode estimular o tecido a crescer – a se alongar – e, assim, produzir o comprimento de trabalho de tecido necessário. O remédio para apertar as suturas baseia-se no mesmo princípio, mas é “uma coisa horrível”.
Dupont decidiu projetar um robô em forma de tubo que pudesse preencher temporariamente a lacuna e aplicar simultaneamente forças de tração em ambas as extremidades do esôfago destacado, a fim de estimular o crescimento e, ao mesmo tempo, permitir que a criança estivesse acordada e com mobilidade. Quando testados em porcos, os animais estavam alertas, movimentavam-se e comiam normalmente com o dispositivo instalado. Embora o robô não pudesse prosseguir para testes em humanos porque os custos de comercialização da invenção eram demasiado elevados para um número tão pequeno de casos, o trabalho sugere os extraordinários feitos de engenharia agora possíveis na robótica médica – desde a melhoria da técnica cirúrgica até à melhoria da saúde dos pacientes.
Tornando “robôs curvilíneos” simples
Os roboticistas são, no fundo, inventores, muitas vezes trabalhando no limite do que é possível. “Não quero fazer algo que outras pessoas já estejam fazendo”, diz Dupont. “Quero fazer algo que esteja muito além.” Por outro lado, diz ele, “vim ao hospital porque os médicos estavam lá para me dizer: ‘Pierre, que ideia estúpida’. E assim, deu-me a oportunidade de concentrar o meu trabalho para garantir a relevância clínica.”
Dupont é um guia especializado em robótica médica: ele e seus colegas publicaram recentemente na Science uma visão geral da área que documentou a proliferação de artigos sobre o assunto, de menos de 10 em 1990 para mais de 5.200 em 2020. Oitenta por cento da pesquisa foram publicados nos últimos 10 anos, impulsionados em grande parte pela aceitação dos robôs pelos sistemas de saúde e pelo investimento no seu desenvolvimento. Mas o campo ainda é incipiente e muitos roboticistas, diz Dupont, tendem a inventar dispositivos que são elegantes do ponto de vista da engenharia, mas não são necessariamente mais práticos do que as tecnologias existentes.
Citando um exemplo pessoal, sua equipe de pesquisa desenvolveu um método elaborado para projetar os campos eletromagnéticos de uma máquina de ressonância magnética (MRI), a fim de impulsionar robôs semiautônomos através do corpo humano. Uma experiência de prova de princípio mostrou que o campo magnético poderia até acelerar pequenos “milibots” – feitos de liga de aço – com rapidez suficiente para perfurar bloqueios de placas arteriais (os detritos residuais seriam capturados por filtros pré-colocados, atualmente em testes). Essa capacidade de penetrar nos tecidos moles usando o eletromagnetismo poderá algum dia ser útil em locais de difícil acesso. Por exemplo, o dispositivo poderia restabelecer o fluxo do líquido cefalorraquidiano no cérebro de pacientes com hidrocefalia, uma condição na qual os bloqueios levam ao aumento de pressão potencialmente fatal. (Mas tratamentos arraigados e eficazes – como a angioplastia com balão para dilatação das artérias – são uma barreira formidável para o aperfeiçoamento de novos métodos).
As invenções mais desenvolvidas de Dupont são “robôs contínuos” semelhantes a cateteres para navegar pelas curvas e formas únicas de estruturas biológicas ramificadas. “O robô industrial tradicional era algo que parecia um braço humano e tinha articulações discretas”, explica. “Se você quiser entrar no corpo, designs de elos rígidos, discretos e articulados não funcionam.” Em vez disso, os robôs contínuos podem dobrar-se em qualquer direção e comportar-se como se tivessem um número infinito de juntas. A Dupont desenvolveu um baseado em tubos concêntricos, como os de uma antena telescópica de rádio. Combinando comprimentos de tubos metálicos flexíveis pré-curvados, a ponta deste robô pode ser posicionada com precisão girando os anéis concêntricos dos tubos em suas bases. Suas curvas inerentes interagem elasticamente para posicionar a ponta e também controlar o formato do robô ao longo de todo o seu comprimento. A matemática aplicada que aprendeu durante uma bolsa de pós-doutorado em engenharia em Harvard, diz ele, “tornou a modelagem desses robôs curvilíneos muito mais simples”, para que possam ser projetados e controlados com precisão.
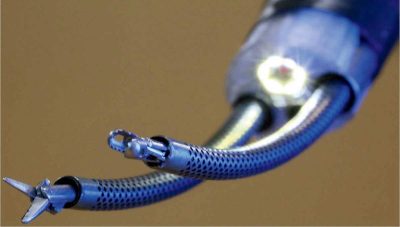 Tubos concêntricos curvos (dentro de bainhas perfuradas) permitem que os cirurgiões posicionem com precisão as ferramentas nas pontas deste robô neurocirúrgico endoscópico de dois braços. – Pierre Dupont
Tubos concêntricos curvos (dentro de bainhas perfuradas) permitem que os cirurgiões posicionem com precisão as ferramentas nas pontas deste robô neurocirúrgico endoscópico de dois braços. – Pierre Dupont
Dupont desenvolveu seu primeiro robô de tubo concêntrico enquanto tentava resolver um problema de cardiologia fetal. Mais recentemente, ele aproveitou essa experiência no desenvolvimento contínuo de um robô de dois braços para realizar neurocirurgia endoscópica através de um único pequeno orifício no crânio. “Os neurocirurgiões me disseram: ‘Olha, há um limite para o que posso fazer com uma ferramenta. Quero dois braços como se estivesse fazendo uma cirurgia aberta normal.’” Com financiamento do National Institutes of Health, ele desenvolveu um sistema com braços que podem ser movidos e controlados a partir de interfaces conectadas aos dedos. Em uma tela, o cirurgião consegue ver o que está acontecendo na ponta dos instrumentos robóticos. “É um sistema extraordinário”, diz ele, que poderia ser usado em até 20 mil cirurgias de tumores cerebrais por ano. E também tem potencial para ser útil em procedimentos cirúrgicos mais comuns.
Robôs cirúrgicos que “veem” e “sentem”
Os robôs de tubos concêntricos são ideais para procedimentos minimamente invasivos, que normalmente levam a uma recuperação mais rápida do paciente do que cirurgias abertas. Mas como são realizados através de pequenas incisões, os cirurgiões também precisam de ferramentas melhores para ver e talvez sentir o que estão fazendo. No vizinho Brigham and Women’s Hospital, o professor associado de radiologia Jayender Jagadeesan está realizando esse trabalho. “Os robôs melhoram a destreza”, diz ele. “Mas isso não é suficiente. Durante a cirurgia, haverá sangue, fumaça, problemas de iluminação e estruturas anatômicas importantes geralmente ficam escondidas atrás do tecido exposto. Você também tem que melhorar a visão do cirurgião.” Jagadeesan tem desenvolvido sistemas cirúrgicos robóticos que podem integrar uma variedade de tecnologias de imagem, desde laparoscopia estéreo, ressonâncias magnéticas, tomografias computadorizadas e ultrassonografias, para criar uma exibição tridimensional em tempo real que mostra claramente o que o robô está fazendo dentro um paciente.


Jayender Jagadeesan (à direita) desenvolve sistemas de imagem tridimensionais para integração em cirurgias robóticas. O pós-doutorado Ruisi Zhang trabalha com feedback tátil para controles cirúrgicos para transmitir a ilusão de toque. – Jim Harrsion/Gráfico: Jayender Jagadeesan
Ele também desenvolveu uma forma de indicar a localização de tumores subterrâneos, usando uma sobreposição visual para identificar sua posição. Normalmente, os cirurgiões localizam tumores subterrâneos durante a cirurgia aberta, palpando o tecido com os dedos. “Essa é uma maneira muito grosseira de fazer isso”, diz Jagadeesan, um método imprevisível que deixa os médicos adivinhando os limites do tumor. Se durante a análise subsequente da massa excisada, um patologista descobrir que muito pouco tecido circundante (uma “margem insuficiente”) foi removido, deixando potencialmente células cancerígenas para trás, uma segunda cirurgia deverá ser realizada. Como o sistema Jagadeesan mostra a forma e a localização dos tumores em 3 dimensões, ele ajuda os cirurgiões a remover uma quantidade suficiente de tecido circundante na primeira vez.
O sistema de navegação de Jagadeesan tem sido usado para vários procedimentos cirúrgicos, incluindo aqueles que envolvem a remoção de gânglios linfáticos malignos, câncer renal e tumores de paratireoide e tireoide. E pode ser especialmente útil para operações para remover cânceres de pulmão em estágio um. No momento, o tratamento padrão para esses tumores envolve a remoção de um lobo inteiro do pulmão, o que reduz permanentemente a capacidade respiratória do paciente. Mas “com a avaliação das margens em tempo real na sala de operações”, diz Jagadeesan, os cirurgiões podem determinar a localização dos tumores e as margens necessárias mesmo antes de começarem a cortar o tecido, removendo apenas o necessário. Esta aplicação do sistema está atualmente em ensaios clínicos.
Um dos alunos de pós-doutorado de Jagadeesan, Ruisi Zhang, está trabalhando em mais um aprimoramento para robôs cirúrgicos: feedback tátil que poderia fornecer aos cirurgiões a sensação de toque. Para conseguir isso, diz ela, “o primeiro desafio é registrar a textura e a dureza” dos objetos do mundo real. Quanta resistência um instrumento cirúrgico encontra quando encontra tecidos moles? E como essa resistência pode ser traduzida como uma sensação no ponto de contato do cirurgião com um robô, como um joystick manuseado através de uma luva cirúrgica de látex?
Zhang observa que os humanos não podem determinar a direção a partir de sinais vibracionais de alta frequência (como alguns animais conseguem), mas podem sentir a direção através da aplicação de força. Isso é útil, continua ela, porque significa que os dois tipos de sinais – vibração e força – são separados. As vibrações podem ser usadas para transmitir textura, enquanto os sinais de força de baixa frequência podem transmitir sensações táteis, como dureza, escorregadio e a forma geral de um objeto. A sensibilidade de cada cirurgião a esse feedback é diferente e pode mudar com a idade ou até mesmo com a espessura da luva cirúrgica que ele usa em um determinado dia. Homens e mulheres, diz Zhang, também têm sensibilidades diferentes ao toque. Isso significa que o ponto de interação com qualquer robô pode precisar ser ajustável, mas também que o feedback que ele fornece deve ser projetado para ser o mais amplamente útil possível.
Fundamentalmente, enfatiza Zhang, o feedback tátil é a arte da ilusão. Ela não consegue recriar todas as sensações que seriam aparentes em uma cirurgia real, porque nem todas podem ser traduzidas. Mas ela espera que o que ela e outros investigadores desenvolvam seja aplicável a diferentes tipos de tecidos, órgãos e cirurgiões, para que possa ser amplamente utilizado em cirurgias assistidas por robôs.
“Fancy Pants”: robôs construídos para pacientes
Bryant Butler era um advogado de 33 anos que trabalhava muitas horas em um escritório de advocacia na área de Washington, DC, quando um derrame alterou sua vida para sempre. Após um tratamento de canal para um dente com abscesso, ele desenvolveu o que seu médico diagnosticou como uma infecção sinusal e foi tratado com antibióticos várias vezes durante quatro meses e meio. Mas a infecção no dente se espalhou silenciosamente para a superfície de uma das válvulas cardíacas, formando um crescimento bacteriano. Quando pedaços desse crescimento se romperam, os fragmentos tóxicos se espalharam pela corrente sanguínea e atingiram o cérebro, causando vários derrames que deixaram Butler parcialmente paralisado de um lado. Ele não conseguia andar, falar ou pensar com clareza. Isso foi há 16 anos.
Após um ano de reabilitação e fonoaudiologia, Butler voltou a trabalhar meio período em sua empresa. Em julho de 2005, antes do derrame, ele havia faturado 195 horas. Dois anos depois, ele faturava apenas 36 horas por mês. Eventualmente, a empresa pediu que ele renunciasse, diz ele. “Eles precisavam de alguém para usar aquele escritório em tempo integral.” Olhando para trás, para o arco dos acontecimentos, acrescenta, a sua demissão foi um passo importante no caminho para aceitar que a sua vida tinha mudado irrevogavelmente.
Hoje, Butler participa de testes para avaliar robôs macios e vestíveis – criações do professor de engenharia e ciências aplicadas de Maeder, Conor Walsh – que ajudam pacientes com AVC e outras pessoas a andar novamente.
 Bryant Butler usa um robô de tornozelo que o ajuda a andar, depois que um derrame comprometeu sua mobilidade. – Jim Harrsion
Bryant Butler usa um robô de tornozelo que o ajuda a andar, depois que um derrame comprometeu sua mobilidade. – Jim Harrsion
“Conor”, diz o professor de engenharia de Lawrence, Robert Howe, “é notável. Ele inventou todo o campo dos exosuits suaves. Anteriormente, as pessoas construíam essas coisas grandes, rígidas e desajeitadas, que você sabe, são ótimas se você estiver tentando fazer um paraplégico andar novamente. Mas para os idosos, ou pacientes pós-AVC, onde você deseja prestar alguma assistência, eles não vão arrastar cerca de 50 quilos de robô.” Em vez de criar exoesqueletos pesados, semelhantes aos do “Homem de Ferro”, a abordagem de Walsh tem sido usar pequenos motores e cabos presos no quadril ou abaixo do joelho para aplicar a quantidade certa de força no momento certo, reduzindo assim os custos de energia do movimento. ou corrigir déficits de marcha causados por lesões. O campo avançou rapidamente. Walsh expandiu seu trabalho para dispositivos pneumáticos de assistência para a parte superior do corpo, e parte da tecnologia já está disponível comercialmente. Dupont acrescenta: “Ele tem tido um sucesso fantástico nesta área e é o melhor representante de todo o subcampo da robótica assistencial e de reabilitação”.
Walsh veio de uma área rural no sopé dos arredores de Dublin para os Estados Unidos, neto de pedreiros por parte de ambos os pais, para fazer pós-graduação no MIT. Lá, ele trabalhou pela primeira vez com exoesqueletos robóticos, testando os dispositivos e aprendendo sobre a interseção da biomecânica e da engenharia de tecnologias de aumento humano. Depois, em seu trabalho de doutorado, ele migrou para dispositivos médicos que pudessem ser usados em cirurgia. Mas quando foi contratado como professor assistente em Harvard, na Escola de Engenharia e Ciências Aplicadas (SEAS), em 2012, ficou fascinado pelo trabalho de colegas que desenvolviam robôs leves: pequenos dispositivos para agarrar, rastejar e nadar.
 Conor Walsh desenvolveu robôs vestíveis que ajudam pessoas com problemas de marcha. –
Conor Walsh desenvolveu robôs vestíveis que ajudam pessoas com problemas de marcha. –
Jim Harrsion
“Nunca tinha pensado em robótica suave antes”, lembra ele. “E então comecei a fazer a conexão entre o que era possível com a robótica suave e a robótica vestível”, revisitando as ideias por trás de seu trabalho anterior, mas “olhando para ele de uma nova perspectiva”.
Inicialmente, Walsh estava interessado na melhoria do desempenho humano. Seu primeiro robô macio e vestível, desenvolvido com financiamento da Agência de Projetos de Pesquisa Avançada de Defesa, foi projetado para ajudar os soldados a viajarem mais longe e sob cargas mais pesadas do que poderiam naturalmente. Em seu laboratório de Biodesign no novo complexo de ciência e engenharia em Allston, abundam as evidências deste primeiro projeto. O protótipo, repleto de fios e apelidado de “calça chique”, está posicionado próximo à entrada do laboratório. Mais além, há grandes mesas com peças de tecido guardadas em cubículos abaixo, e em uma sala adjacente, alinhadas ordenadamente com fileiras de prateleiras, estão as botas especiais daquele primeiro experimento: os pontos de fixação são para cabos que se apertam no calcanhar para empurrar a ponta do pé para baixo, conforme necessário. o usuário empurra a planta do pé e, em seguida, encurta na frente para levantar o dedo do pé enquanto o pé balança para a próxima etapa.
Depois que Walsh desenvolveu a engenharia para fornecer assistência para caminhar a indivíduos saudáveis que usavam esses robôs de tornozelo, ele começou a traduzir o dispositivo para ajudar pessoas com dificuldade de marcha.
Um laboratório de captura de movimento no nível inferior do edifício – uma instalação central da Universidade para medir a locomoção humana – permite esse tipo de análise. Placas no chão podem medir as forças geradas durante a caminhada, enquanto esteiras equipadas com máscara e bicicletas estacionárias podem medir o consumo de oxigênio, um indicador do gasto de energia. Uma pista oval que traça o perímetro deste longo espaço retangular semelhante a uma academia é espelhada no teto, onde arneses podem ser presos para garantir que os participantes do estudo – pacientes com acidente vascular cerebral, pessoas com doença de Parkinson ou que sofreram lesões na medula espinhal – possam testar com segurança os robôs de Walsh. A Rewalk Robotics licenciou a tecnologia do robô de tornozelo de Harvard em 2016.
Walsh também trabalha com pacientes por meio de colaborações de longa data com cientistas de reabilitação do Massachusetts General Hospital (MGH) e da Universidade de Boston – pessoas como Lou Awad, especialista em biomecânica e fisioterapia de reabilitação que Walsh conheceu quando ambos trabalhavam em robótica no Wyss Institute de Harvard. Estas colaborações são críticas, diz Walsh, porque o seu trabalho não é impulsionado pela matemática aplicada, mas por dados: “Cada projeto de investigação que partilhamos envolve três a cinco pessoas que definem os objetivos do estudo, planeiam visitas de estudo, trazem participantes, testar tecnologias, coletar dados e depois tentar analisar e interpretar esses dados, para entender se o que estamos fazendo está ajudando as pessoas ou não.” Diz Walsh: “Estou aprendendo com isso e iterando continuamente”.
Recentemente, seu grupo fez uma descoberta emocionante com um paciente com Parkinson. Um subconjunto de indivíduos com a doença congela repentinamente ao caminhar e não consegue voltar a andar facilmente. Usando um tipo diferente de exosuit, este para ajudar a coxa a balançar para frente, a equipe de Walsh descobriu que um indivíduo com esse problema pode andar normalmente, sem congelar no meio da marcha.
O próximo passo para seus exosuits suaves envolve maior personalização e a capacidade de usar os dispositivos com menos supervisão. Bryant Butler testou recentemente a versão do exosuit para tornozelo em casa durante um mês e descobriu que ele ajudava na caminhada e também proporcionava um benefício terapêutico: melhorar a marcha mesmo nos momentos em que não o usava.
Diz Walsh: “O campo está evoluindo em direção à avaliação”, o monitoramento contínuo dos usuários. “Precisamos de maneiras práticas de sentir como as pessoas estão se movendo no mundo real.” Como um primeiro passo nessa direção, descrito em um artigo de pesquisa recente, Walsh se uniu a Howe e ao colega de pós-doutorado Richard Nuckols para usar a tecnologia de imagem de ultrassom de alta velocidade de Howe (veja a barra lateral abaixo) para analisar a dinâmica muscular de um usuário de exosuit em tempo real. , permitindo a calibração quase instantânea do robô para o indivíduo e para a atividade específica dessa pessoa a qualquer momento.
“Como podemos monitorizar a melhoria se uma pessoa está a passar por reabilitação, ou monitorizar a degradação do desempenho se uma pessoa tem, por exemplo, uma doença neurodegenerativa”, pergunta Walsh, “que fará com que piore com o tempo? Ou talvez tenham começado um novo medicamento e queremos saber se está ajudando. No momento, simplesmente não temos as ferramentas que nos permitem fazer isso.”
Este tipo de feedback seria especialmente útil para pacientes com esclerose lateral amiotrófica (ELA), cuja doença (comumente conhecida como doença de Lou Gehrig) é progressiva. Robôs pneumáticos que Walsh projetou para apoiar o ombro ou exercitar a mão auxiliam nos movimentos da parte superior do corpo. A professora assistente de medicina física e reabilitação Sabrina Paganoni, colaboradora clínica e médica investigadora do Healey Center for ALS do MGH, diz que esses robôs são ideais porque são modulares. “Você poderia começar com um”, diz ela, “e depois adicionar o outro”, dependendo do padrão de progressão da doença. Os medicamentos para o tratamento da ELA estão no horizonte, relata ela, o que só aumentará esta população de pacientes, à medida que mais deles vivem, mas necessitam de assistência. E uma colaboração com o professor sênior de neurologia Leigh Hochberg, o inventor do Braingate (uma neuroprótese implantável que traduz a intenção do usuário em comandos de computador), baseada no MGH, pode tornar possível algum dia que esses pacientes movam os braços e as mãos usando apenas sinais de ondas cerebrais que poderiam direcionar a ação dos robôs de Walsh.
Butler, que não consegue sentir totalmente a posição do pé desde o derrame, torceu o tornozelo há 10 anos. Agora, quando ele anda, ele deve se concentrar para não se machucar novamente. Usar o robô, diz ele, torna a caminhada “uma tarefa muito menos exigente do ponto de vista cognitivo, pois me mostra como deveria ser a sensação”. Ele não tem carro, então faz todas as suas tarefas a pé. “Eu não percebi o quão desgastante” era o ato de simplesmente caminhar, diz ele, “até depois de usar o dispositivo por oito semanas e então parar de usá-lo. Eu gostaria de poder usá-lo todos os dias. Isso me dá uma sensação de segurança e confiança ao caminhar que não sentia há muito tempo.”
Publicado originalmente na Harvard Magazine
Por Jonathan Shaw






Nenhum comentário ainda, seja o primeiro!